微嵌組態人機界面與單片機通信案例
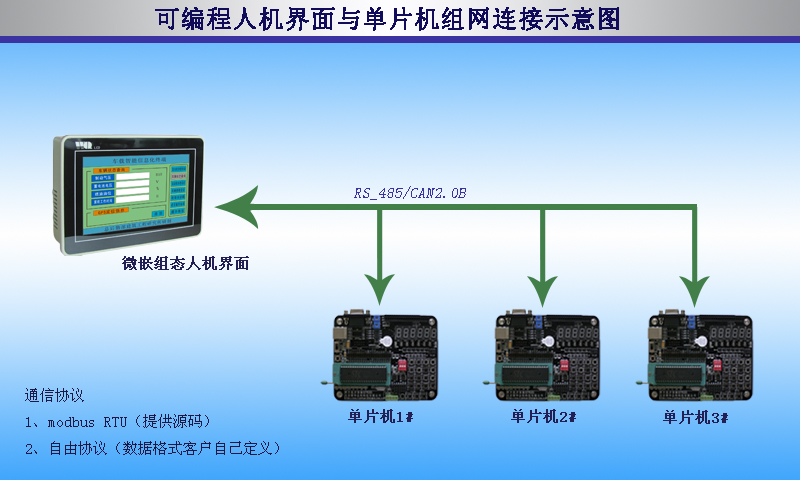
很多時候,工業控制或者產品設計方面受到PLC這種功能確定,擴展麻煩,成本昂貴等方面的制約因素,需要獨立開發一種特殊功能,但是又需要連接觸摸屏通訊,工程師在這個方面往往需要花費很大功夫,現在我要幫大家解決的問題就是 單片機與人機界面觸摸屏通訊的最簡單,最有效的 2種方法,其實就是分為2種通訊協議,即工業標準的 Modbus RTU協議和 工程師自己定義的 自由協議。
本實例采用微嵌組態軟件,因為公司提供一系列的技術支持和公布單片機源代碼,加上公司的人機界面支持自由協議等等先天優勢,開發工程方便有效。
方案比較:
方案一 modbus—rtu協議:
優點:工業標準通訊協議,具有通用性,,傳輸數據量大
缺點:需要時間去了解協議的格式和以及按照規定編寫通訊程序(需要MODBUS-RTU源代碼)
方案二 自由協議:
優點:數據格式客戶自己定義,靈活多變,定制性強,可以模擬任何已知報文的通訊協議
缺點:傳輸數據量不大,通用性不強,移植不方便
工程師可以根據以上兩種通訊協議的優缺點來選擇理想的方案;
新建一個工程文件
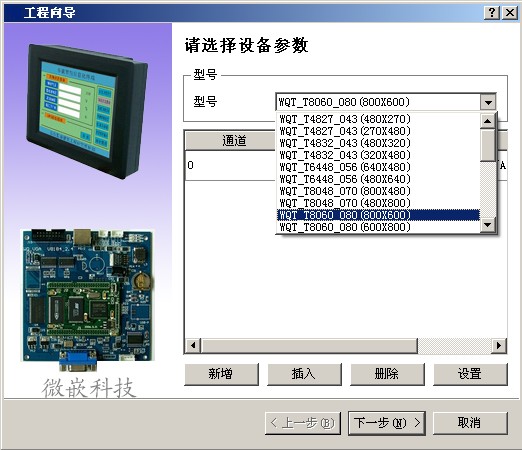
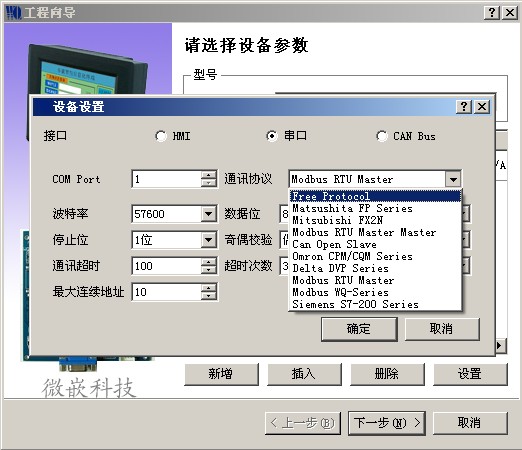
型號對應的是公司出產產品型號。新增一個通信口,微嵌的人機界面有兩個通訊口COM1,COM2,這兩個串口既可以做RS232,又可以做RS485,通訊協議對應的是單片機工程師需要用到的協議,其中有modbus RTU協議,自由協議Free Protocol,當然還包括西門子S7-200,臺達PLC,歐姆龍,三菱等協議,這里我們選擇COM1自由協議Free Protocol,通訊速率57600,數據位8,1位停止位,偶校驗:
首先我們隨便建一個比較簡單實用的畫面,用位按鈕開關控制單片機的指示燈,采集單片機的模擬數據顯示在組態軟件的數碼管(可以通過電腦串口連接單片機在線模擬實際應用)
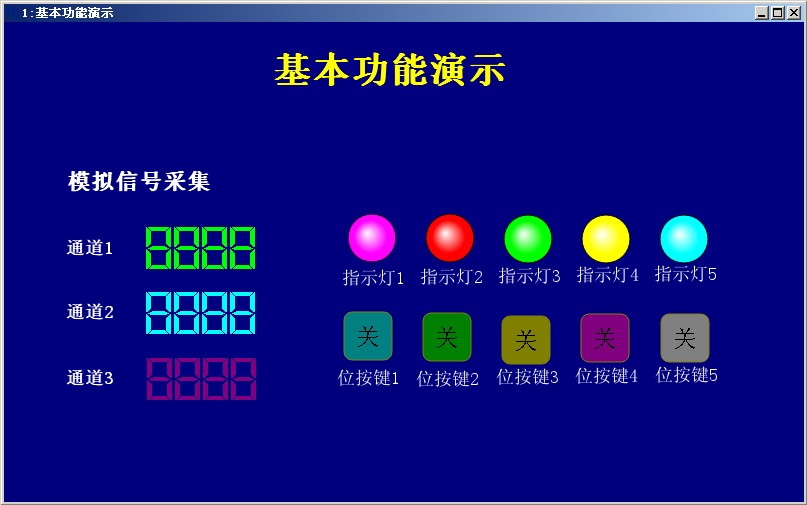
然后我們要把位按鈕的屬性綁定到人機界面的系統寄存器,然后再用人機界面內置的宏指令通訊函數output函數把寄存器數據傳輸給單片機,讓單片機接收這個指令之后進行動作控制,方法實現如下:
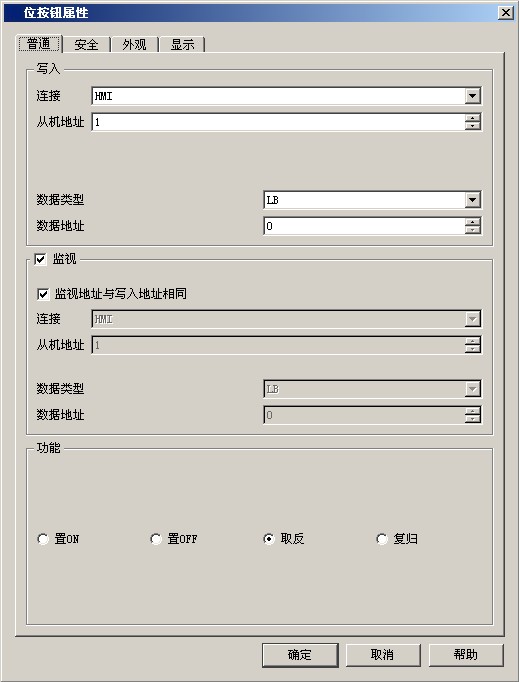
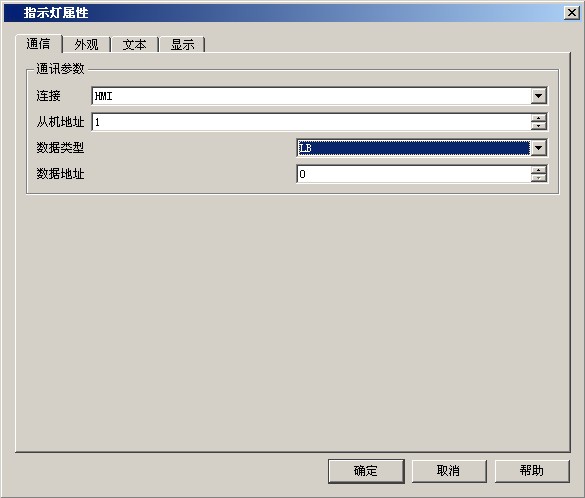
我們把位按鈕1綁定到人機界面系統寄存器LB的第0個里面,再用一個LED指示燈觀察按鈕的狀態(綁定系統寄存器LB0)
對于數碼管顯示,屬性設置原來差不多,但是需要用input函數將從單片機采集的數據存儲到人機界面系統寄存器,再通過宏指令函數映射顯示出來,方法如下:
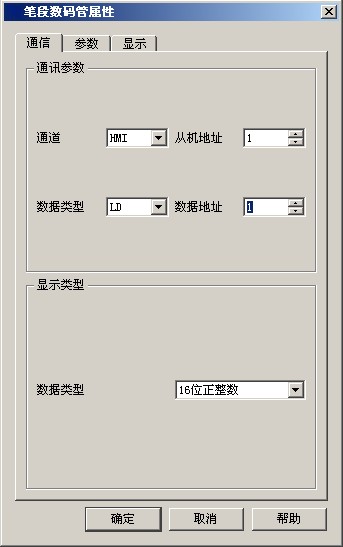
我們將通道一綁定到系統寄存器LD的第1個寄存器,LD是數據寄存器,LB是布爾量的位寄存器,注意兩種寄存器的區別。
接下來我們要用到人機界面的組態軟件內置的通訊函數,數學運算函數和其他函數了。由“設定”菜單那里進入到宏指令編輯器進入宏指令編輯:
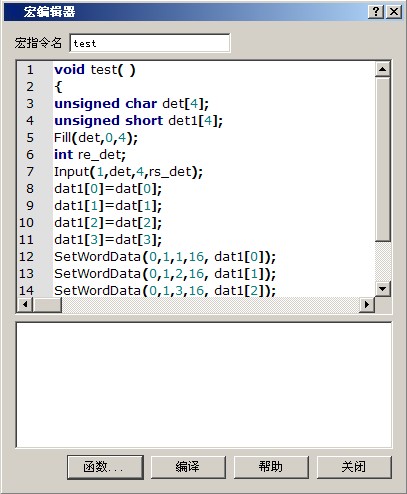
點擊新增,我們寫一個宏指令通訊函數,向單片機發送控制指令和接受數據:
具體編程如下:
宏指令test
void Macro_main( )
{
unsigned char dat[4];
unsigned short dat1[4];
int re_dat;
Input( 1, dat, 4, re_dat);
/*如果不明白函數使用,可以點擊函數向導按鈕查找函數使用說明:
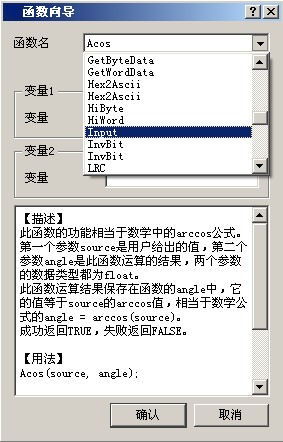
【描述】
第一個參數channel表示通道,如果通道為com1,則channel=1;如果通道為com2,則channel=2,數據類型為int。
第二個參數pString表示寫入通道的字符串的地址,數據類型為unsigned char *。
第三個參數count表示字符串中的字符個數,數據類型為int。
第四個參數result表示Output函數運行后返回的結果,如果result大于0,則表示讀寫有效,數據類型為int。
注意:此函數只能用在freeprotocol(自由協議通道)中。
【用法】
Input(channel,pString,count,result);
【舉例】
char srt[9];
int result;
Input(1,str[0],9,result);
dat1[0]=dat[0];
dat1[1]=dat[1];
dat1[2]=dat[2];
dat1[3]=dat[3];
SetWordData(0,1,1,16, dat1[0]);
SetWordData(0,1,2,16, dat1[1]);
SetWordData(0,1,3,16, dat1[2]);
SetWordData(0,1,4,16, dat1[3]);
}
test2:用于發送指令到單片機進行控制,主要用到output函數
static unsigned char key[3];
void Macro_main( )
{
bool key_data[16];
int re_dat;
GetByteData(0, 1,0, 9, 0,key_data);
key[0] = key_data[7]<<7 | key_data[6]<<6 | key_data[5]<<5 | key_data[4]<<4 | key_data[3]<<3 | key_data[2]<<2 | key_data[1]<<1 | key_data[0];
//key[1]=key_data[15]<<7 | key_data[14]<<6 | key_data[13]<<5 | key_data[12]<<4 | key_data[11]<<3 | key_data[10]<<2 | key_data[9]<<1 | key_data[8];
key[1]=key_data[8];
Output( 1, key, 2, re_dat);
}
對應單片機下位機的編程,作為單片機開發者應該都知道如何編程了,這里我就提供這個例子的51單片機源代碼供大家參考:
[ 此帖被wqlcdchen在2012-05-28 15:36重新編輯 ]
 滬公網安備31010802001143號
滬公網安備31010802001143號

