1. 基本的通訊方式
基本的通訊方式有并行通訊和串行通訊兩種。
并行通信:是指數(shù)據(jù)的各位同時(shí)進(jìn)行傳送的通信方式。
串行通信:是指數(shù)據(jù)一位一位順序傳送的通信方式。
2. 串行通訊的兩種方式
串行通信的兩種基本形式:同步通信和異步通信。
異步通信所傳輸?shù)臄?shù)據(jù)幀格式是由1個(gè)起始位、1~9個(gè)數(shù)據(jù)位、1~2個(gè)停止位組成,依靠起始位和停止位保持同步;
同步通信所傳輸數(shù)據(jù)幀格式是由多個(gè)字節(jié)組成的一個(gè)幀,每個(gè)幀都有兩個(gè)(或一個(gè))同步字符作為起始位以觸發(fā)同步時(shí)鐘開始發(fā)送或接收數(shù)據(jù)。
3. 根據(jù)傳送方向分類
根據(jù)信息的傳送方向,串行通訊可以進(jìn)一步分為單工、半雙工和全雙工三種。
如果在通信過(guò)程的任意時(shí)刻,信息只能由一方A傳到另一方B,則稱為單工。
如果在任意時(shí)刻,信息既可由A傳到B,又能由B傳A,但只能由一個(gè)方向上的傳輸存在,稱為半雙工傳輸。
如果在任意時(shí)刻,線路上存在A到B和B到A的雙向信號(hào)傳輸,則稱為全雙工。

4. 串行通訊接口
串行通訊物理接口按電氣標(biāo)準(zhǔn)及協(xié)議來(lái)分包括RS-232、RS-422、RS485等,這里主要講一些最常用的RS485接口。
5. RS485接口電路
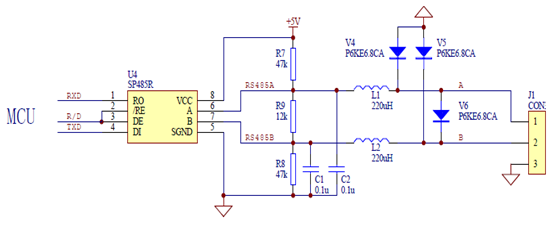
作為一個(gè)經(jīng)常被應(yīng)用到的SP485R芯片的示范電路,可以被直接嵌入實(shí)際的RS-485
應(yīng)用電路中。微處理器的標(biāo)準(zhǔn)串行口通過(guò)RXD 直接連接SP485R 芯片的RO 引腳,通過(guò)TXD直接連接SP485R 芯片的DI 引腳。
由微處理器輸出的R/D 信號(hào)直接控制SP485R 芯片的發(fā)送器/接收器使能:R/D 信號(hào)為“1”,則SP485R 芯片的發(fā)送器有效,接收器禁止,此時(shí)微處理器可以向RS-485 總線發(fā)送數(shù)據(jù)字節(jié);R/D 信號(hào)為“0”,則SP485R 芯片的發(fā)送器禁止,接收器有效,此時(shí)微處理器可以接收來(lái)自RS-485 總線的數(shù)據(jù)字節(jié)。此電路中,任一時(shí)刻SP485R 芯片中的“接收器”和“發(fā)送器”只能夠有1 個(gè)處于工作狀態(tài)。
連接至A 引腳的上拉電阻R7、連接至B 引腳的下拉電阻R8 用于保證無(wú)連接的SP485R芯片處于空閑狀態(tài),提供網(wǎng)絡(luò)失效保護(hù),以提高RS-485 節(jié)點(diǎn)與網(wǎng)絡(luò)的可靠性。
如果將SP485R 連接至微處理器80C51 芯片的UART 串口,則SP485R 芯片的RO 引腳不需要上拉;否則,需要根據(jù)實(shí)際情況考慮是否在RO 引腳增加1 個(gè)大約10K 的上拉電阻。
6. 串口MODBUS通訊
Modbus作為工業(yè)通信回路中數(shù)據(jù)交換的規(guī)則已經(jīng)被廣泛地應(yīng)用在各個(gè)領(lǐng)域,使得具有Modbus 通信協(xié)議的設(shè)備方便通信,例如PLC、變頻器、流量計(jì)、溫濕度、上位機(jī)組態(tài)軟件、各種傳感器儀表等。
Modbus通信協(xié)議分為兩種串行通信模式,ASCII 和RTU 通信模式。在使用時(shí),需要先設(shè)定通信模式以及串行口RS232、RS485的通信參數(shù)(波特率,奇偶校驗(yàn),從機(jī)地址,數(shù)據(jù)位,停止位,字節(jié)順序),在Modbus 總線上的所有設(shè)備應(yīng)具有相同的通信模式和串行通信參數(shù)
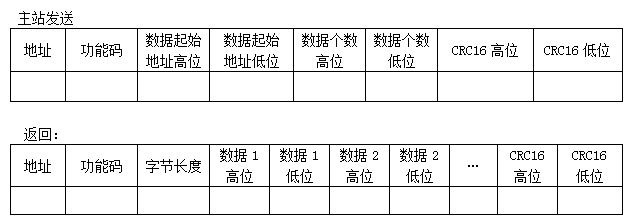
modbus信息幀結(jié)構(gòu)組成

7. MODBUS命令報(bào)文
讀數(shù)據(jù)
8. MODBUS關(guān)鍵概念
(1)上位機(jī)讀取數(shù)據(jù)每次間隔時(shí)間一般不小于100ms
(2)設(shè)備地址:MODBUS從機(jī)通訊地址,在一個(gè)網(wǎng)絡(luò)中不能有兩個(gè)相同的地址。(3)功能碼:MODBUS 協(xié)議規(guī)定的功能碼
(4)寄存器地址和寄存器數(shù)
主站命令中的參數(shù)是從寄存器地址開始的寄存,讀寄存器長(zhǎng)度的N個(gè)寄存器。(5)從站響應(yīng)數(shù)據(jù)
從站響應(yīng)數(shù)據(jù)是:字節(jié)數(shù)和N個(gè)數(shù)字節(jié)數(shù)據(jù)。
9. MODBUS主站常用操作
1)讀優(yōu)化:對(duì)于不連續(xù)地址的數(shù)據(jù)讀取,是否采取打包讀,則系統(tǒng)使用打包讀命令,一次性完成多個(gè)地址的讀取。
2)讀優(yōu)化間隔:讀優(yōu)化時(shí),若地址之間小于此間隔,則會(huì)打包到一起,使用多讀命令一次讀取。
3)最大包長(zhǎng):一次通訊允許的最大數(shù)據(jù)長(zhǎng)度。
4)字節(jié)順序:調(diào)整32位雙字的解碼順序。
以32位整數(shù)為例,說(shuō)明字節(jié)順序的含義:
1234:表示雙字元件不做處理直接解碼,。
例如:從串口讀到的數(shù)據(jù)為0000 00 01 表示 1。
2143:表示雙字元件高低字不顛倒,但字內(nèi)高低字節(jié)顛倒。
例如:從串口讀到的數(shù)據(jù)為0000 00 01 表示 0x00000100 (即256)。
3412:表示雙字元件高低字顛倒,但字內(nèi)高低字節(jié)不顛倒。
例如:從串口讀到的數(shù)據(jù)為0000 00 01 表示 0x00010000 (即65536)。
4321:表示雙字元件內(nèi)4個(gè)字節(jié)全部顛倒。
例如:從串口讀到的數(shù)據(jù)為00 00 00 01 表示 0x0100 0000 (即1677 721
10. C語(yǔ)言MODBUS程序
(1).CRC16算法:
INT16U CRC16(INT8U *puchMsg, INT16U usDataLen)
{
INT8U uchCRCHi = 0xFF; /* 高CRC字節(jié)初始化 */
INT8U uchCRCLo = 0xFF; /* 低CRC 字節(jié)初始化 */
INT8U uIndex; /* CRC循環(huán)中的索引 */
while (usDataLen--) /* 傳輸消息緩沖區(qū) */
{
uIndex = uchCRCHi ^*puchMsg++; /* 計(jì)算CRC */
uchCRCHi = uchCRCLo ^auchCRCHi[uIndex];
uchCRCLo = auchCRCLo[uIndex];
}
return (uchCRCHi << 8 |uchCRCLo);
}
(2)發(fā)送命令程序
本例程以Mag64為核心CPU
void Read_InPut(INT8U Addr,INT16UStart,INT16U Len)
{
INT16U CRC;
SendBuffer_485[0]=Addr; //設(shè)備地址
SendBuffer_485[1]=0x04; //modbus功能碼
SendBuffer_485[2]=Start/256; //Start為寄存器地址
SendBuffer_485[3]=Start%256;
SendBuffer_485[4]=Len/256; //Len為讀取寄存器長(zhǎng)度
SendBuffer_485[5]=Len%256;
CRC=CRC16(SendBuffer_485,6);
SendBuffer_485[6]=CRC/256; //CRC校驗(yàn)高位
SendBuffer_485[7]=CRC%256; //CRC校驗(yàn)低位
R485_OUT; //使能RS485發(fā)送
SendLen_485=8;
SendNum_485=0;
CloseINT0(); //關(guān)閉串口接受中斷
UCSR0B |= BIT(UDRIE0); //打開串口發(fā)送中斷
}
(3)返回?cái)?shù)據(jù)解析
數(shù)據(jù)接收使用串口中斷,ReceivedBuffer_485為接收數(shù)據(jù)組,ReceivedNum_485為接收到數(shù)據(jù)長(zhǎng)度,ReceivedFlag_485接收到數(shù)據(jù)標(biāo)志。函數(shù)float Datasum(INT8UBYTE1, INT8U BYTE2, INT8U BYTE3, INT8U BYTE4)把浮點(diǎn)數(shù)的4個(gè)字節(jié)轉(zhuǎn)換為1個(gè)浮點(diǎn)數(shù)。
float Datasum(INT8U FloatByte1, INT8U FloatByte2,INT8U FloatByte3, INT8U FloatByte4)
{
float aa;
union IntTOFP
{
FP32 F32;
INT8U T8[4];
};
union IntTOFPaa;
aa.T8[0] = FloatByte1;
aa.T8[1] = FloatByte2;
aa.T8[2] = FloatByte3;
aa.T8[3] = FloatByte4;
return aa;
}
void Read_Lmag(INT8U Ad)
{
INT8U i,j;
INT8U Num1[10],BIT;
INT16UCRC1,CRC2;
FP32 Flow; //aaa為瞬時(shí)流量數(shù)值
ReceivedFlag_485=1;
Open_Time1_Ms5(20);
Read_InPut(Ad,0x1010,2); //發(fā)送設(shè)備地址、寄存器地址、寄存器長(zhǎng)度
while(ReceivedFlag_485); //等待接收結(jié)束
if((ReceivedNum_485==9)&&(ReceivedBuffer_485[0]==Ad)) // 判斷數(shù)據(jù)是否正確
{
CRC1=CRC16(ReceivedBuffer_485,7);
CRC2=ReceivedBuffer_485[7]*256+ReceivedBuffer_485[8];
if(CRC1==CRC2)
{// 轉(zhuǎn)換數(shù)據(jù)為浮點(diǎn)數(shù)
Flow= Datasum(ReceivedBuffer_485[6], ReceivedBuffer_485[5], ReceivedBuffer_485[4] ,ReceivedBuffer_485[3]);
}
}
}
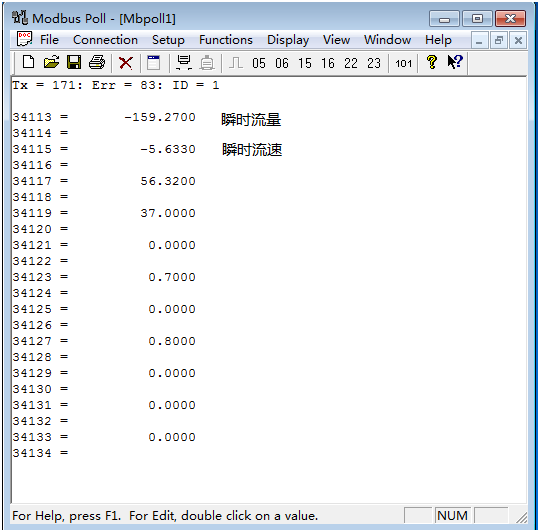
11. MODBUS調(diào)試軟件MODBUS PULL
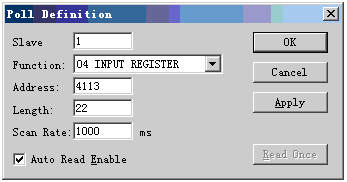
以從站地址為1,波特率9600,讀取所有實(shí)時(shí)數(shù)據(jù)為例設(shè)置方法如下:
按照表2所示:起始寄存器地址4113 寄存器個(gè)數(shù)為22
1. 設(shè)置采集命令包括設(shè)備地址(1)、MODBUS功能碼(04)、寄存器地址(4113)、寄存器長(zhǎng)度(2)、采集間隔(1000)。
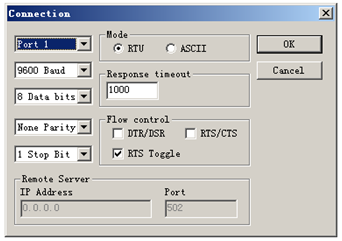
2.設(shè)置串口數(shù)據(jù)
根據(jù)從機(jī)串口格式(1位起始位 8位數(shù)據(jù)位 1位停止位,無(wú)校驗(yàn))設(shè)置如下圖:
3.設(shè)置數(shù)據(jù)顯示格式

4.通訊成功界面
 滬公網(wǎng)安備31010802001143號(hào)
滬公網(wǎng)安備31010802001143號(hào)

